모든 카테고리
-
집적회로 (ic)
집적회로 (ic)
- 인터페이스 - 센서, 커패시 티브 터치(642)
- 특수 ic(12302)
- 마이크-전압 조정기-특수 목적(5644)
- 마이크-전압 조정기-리니어 레 귤 레이 터 컨트롤러(793)
- 마이크-전압 조정기-선형 + 스위칭(1829)
- 마이크-전압 조정기-선형(70981)
- 마이크-전압 조정기-dc dc 스위칭 조정기(39569)
- 마이크-전압 조정기-dc dc 스위칭 컨트롤러(13507)
- 마이크-전압 레퍼런스(9453)
- 마이크-v/f 및 f/v 컨버터(145)
- mic-열 관리(592)
- 마이크-감독자(47946)
- 마이크-rms로 dc 변환기(170)
- 마이크-전원 공급 장치 컨트롤러, 모니터(2104)
- 이더넷 (poe) 컨트롤러에 마이크-전원(1008)
- 마이크-전원 관리-전문(7722)
- 마이크-전원 분배 스위치, 부하 드라이버(7706)
- 마이크-pfc (역률 보정)(1222)
- PMIC- 또는 컨트롤러, 이상적인 다이오드(705)
- 마이크-모터 드라이버, 컨트롤러(4712)
- 마이크-조명, 밸러스트 컨트롤러(560)
- 마이크-led 드라이버(7282)
- 마이크-레이저 드라이버(573)
- 마이크 핫 스왑 컨트롤러(2816)
- 마이크-게이트 드라이버(7083)
- 마이크-풀, 하프 브리지 드라이버(1342)
- 마이크-에너지 계량(654)
- 마이크-디스플레이 드라이버(1435)
- mic-현재 규칙/관리(1481)
- 마이크-배터리 관리(5553)
- 마이크-배터리 충전기(3831)
- PMIC- AC DC 변환기, 오프라인 스위처(4905)
- 메모리 컨트롤러(358)
- fpga에 대 한 메모리 구성 프롬(639)
- 메모리-배터리(13)
- 메모리(65694)
- 로직-유니버셜 버스 기능(706)
- 로직 번역자, 레벨 시프 터(2854)
- 로직-특수 로직(1870)
- 로직 신호 스위치, 멀티플렉서, 디코더(9420)
- 로직 시프트 레지스터(2665)
- 로직 패리티 발생기 및 체커(335)
- 로직 멀티 바이브 레이 터(831)
- 로직 래치의(3658)
- 로직-게이트 및 인버터-멀티-기능, 구성(1687)
- 로직-게이트와 인버터(16453)
- 로직 플립 플롭(7780)
- 로직 fifo 메모리(4240)
- 로직 카운터, 디바이 더(3456)
- 로직 비교 기(592)
- 로직 버퍼, 드라이버, 수신기, 트랜시버(17835)
- 리니어 비디오 프로세싱(2909)
- 선형 비교 기(5084)
- 선형-아날로그 멀티 플라이어, 디바이 더(263)
- 선형 증폭기-비디오 앰프 및 모듈(1905)
- 리니어 앰프-특수 목적(1856)
- 선형 증폭기-계측, op 앰프, 버퍼 앰프(34236)
- 리니어 앰프-오디오(4567)
- 인터페이스-음성 녹음 및 재생(556)
- 인터페이스-uart (범용 비동기 수신기 송신기)(1237)
- 인터페이스-텔레콤(4467)
- 인터페이스 전문(4833)
- 인터페이스 신호 종료 기(333)
- 인터페이스 신호 버퍼, 리피터, 스플리터(1449)
- 인터페이스-시리얼 라이저, 디 시리얼 라이저(1480)
- 인터페이스-센서 및 검출기 인터페이스(1524)
- 인터페이스-모듈(169)
- 인터페이스-모뎀-ics 및 모듈(407)
- 인터페이스-입출력 확장기(1136)
- 인터페이스-필터-활성(1226)
- 인터페이스 인코더, 디코더, 컨버터(714)
- 인터페이스-드라이버, 리시버, 트랜시버(20755)
- 인터페이스-다이렉트 디지털 합성 (dds)(117)
- 인터페이스 컨트롤러(3628)
- 인터페이스 코덱(1676)
- 인터페이스-아날로그 스위치, 멀티플렉서, 복조 기(12567)
- 인터페이스-아날로그 스위치-특수 목적(2533)
- 칩에 내장 시스템 (soc)(4496)
- 임베디드-pll (프로그래머블 로직 소자)(971)
- 내장형 마이크로프로세서(10083)
- 임베디드 마이크로 컨트롤러-응용 프로그램별(2275)
- 임베디드 마이크로 컨트롤러(99285)
- 임베디드 - 마이크로 컨트롤러, 마이크로 프로세서, FPGA 모듈(1527)
- 마이크로컨트롤러로 임베디드 fpga (현장 프로그래밍 가능 게이트 어레이)(81)
- 임베디드 fpga (필드 프로그래밍 가능 게이트 어레이)(27747)
- 내장형 dsp (디지털 신호 프로세서)(4081)
- 임베디드-cfls (복잡 한 프로그래머블 로직 소자)(5187)
- 데이터 수집-터치 스크린 컨트롤러(1210)
- 데이터 수집-디지털 아날로그 컨버터 (dac)(14419)
- 데이터 수집-디지털 포 텐 쇼 미터(6250)
- 데이터 수집-아날로그 디지털 변환기 (adc)(17776)
- 데이터 수집-아날로그 프런트 엔드 (afe)(787)
- 데이터 수집-adc/dac-특수 목적(3043)
- 클록/타이밍-실시간 클록(2446)
- 클록/타이밍 프로그래밍 가능 타이머 및 발진기(23469)
- 클록/타이밍-ic 배터리(4)
- 클록/타이밍-딜레이 라인(1049)
- 클록/타이밍-클록 발생기, pll, 주파수 합성기(32775)
- 클록/타이밍 클록 버퍼, 드라이버(4568)
- 클록/타이밍-응용 프로그램별(8652)
- 오디오 특수 목적(1564)
관련 제조업체







-
이산 반도체 제품
이산 반도체 제품
- 현재 규정 - 다이오드, 트랜지스터(1090)
- 트랜지스터-특수 목적(226)
- 트랜지스터-프로그래밍 가능 단일 접점(48)
- 트랜지스터-fet(1558)
- 트랜지스터-이그bts-단일(4799)
- 트랜지스터-igbt-모듈(63420)
- 트랜지스터-igbt-어레이(26)
- 트랜지스터-fet, 모스 펫-싱글(48330)
- 트랜지스터-fet, 모스 펫-rf(4903)
- 트랜지스터-fet, 모스 펫-어레이(6641)
- 트랜지스터-바이 폴라 (bjt)-단일, 프리 바이어스(4539)
- 트랜지스터-바이 폴라 (bjt)-싱글(25800)
- 트랜지스터-양극 (bjt)-rf(2087)
- 트랜지스터-양극 (bjt)-배열, 프리 바이어스(2115)
- 트랜지스터-바이 폴라 (bjt)-어레이(2310)
- 사이리스-트라이 acs(4044)
- 사이리스-스 크레이-모듈(3967)
- 사이리스-스 크레이 퍼(5436)
- 사이리스-디 acs, 시드 acs(319)
- 전원 드라이버 모듈(1627)
- 다이오드-제너-싱글(87483)
- 다이오드-제너-어레이(2619)
- 다이오드-가변 커패시턴스 (다중, 배 랙 터)(1200)
- 다이오드-rf(2753)
- 다이오드 정류기-단일(67528)
- 다이오드 정류기-어레이(20581)
- 다이오드 브리지 정류기(11700)
관련 제조업체




-
rf/if 및 rfid
rf/if 및 rfid
- 가입자 식별 모듈 (SIM) 카드(77)
- RF 순환기 및 절연체(1742)
- rfid, rf 액세스, 모니터링 ic(1550)
- rfid 트랜스폰더, 꼬리표(747)
- rfid 리더기 모듈(464)
- RFID 평가 및 개발 키트, 보드(30)
- rfid 안테나(329)
- rfi 및 emi 차폐 및 흡수 재료(6444)
- rfi 및 emi 접점, 핑거 스톡 및 틈 막이(7497)
- rf 송신기(668)
- rf 트랜시버 모듈(6900)
- rf 트랜시버 ic(4169)
- rf 스위치(9276)
- rf 보호막(16401)
- rf 수신기(1998)
- RF 수신기, 송신기 및 트랜시버 완성 장치(2763)
- rf 전력 분할기/스플리터(1223)
- rf 전력 컨트롤러 ic(86)
- rf 변조기(710)
- rf 믹서(2800)
- rf 기타 ic 및 모듈(3276)
- rf 프런트 엔드 (lna + pa)(419)
- RF 평가 및 개발 키트, 보드(747)
- rf 지향성 커플러(2718)
- rf 디 플 렉 시(1464)
- rf 검출기(412)
- rf 복조 기(249)
- rf 안테나(12319)
- rf 증폭기(19651)
- 발 룬(1496)
- 감쇠기(4852)
관련 제조업체







-
광전자 공학
광전자 공학
- 광학 기계(480)
- 조명 비품(125)
- 레이저 다이오드, 레이저 모듈 - 레이저 전달, 레이저 섬유(345)
- Hene 레이저 시스템(31)
- Hene 레이저 헤드(27)
- 백라이트를 표시합니다(93)
- 크 세 논 조명(387)
- 터치 스크린 오버레이(453)
- 패널 표시등, 파일럿 표시등(75729)
- 광학-리모트 형광체 광원(269)
- 광학-반사판(665)
- 광학-라이트 파이프(5384)
- 광학-렌즈(4951)
- led-스페이서, 스탠드 오프(2718)
- led 램프 교체(29718)
- led-회로 기판 표시등, 어레이, 라이트 바, 막대 그래프(9083)
- led 열 제품(667)
- led 조명 키트(64)
- led 조명-화이트(37580)
- led 점화-색깔(4728)
- led 조명-코 bs, 엔진, 모듈(28735)
- led 표시-이산(27601)
- 레이저 다이오드, 모듈(1553)
- 램프-백열, 네 스 톤(311004)
- 램프-냉 음극 형광 (ccfl) & uv(164)
- 인버터(7728)
- 적외선, uv, 보이는이 미터(3871)
- 파이버 옵틱-송신기-구동 회로 내장(4085)
- 섬유 광학-송신기-이산(350)
- 파이버 옵틱-트랜시버 모듈(18758)
- 광섬유-스위치, 멀티플렉서, 복조 기(1387)
- 섬유 광학-수신기(695)
- 섬유 광학-감쇠기(654)
- 전기 발광(102)
- 디스플레이, 모니터-인터페이스 컨트롤러(98)
- 디스플레이 모듈-진공 형광 (vfd)(249)
- 디스플레이 모듈-led 도트 매트릭스 및 클러스터(865)
- 디스플레이 모듈-led 문자와 숫자(5421)
- 디스플레이 모듈-lcd, oled, 그래픽(4654)
- 디스플레이 모듈 -LCD, OLED 특성 및 숫자(2202)
- 디스플레이 베젤, 렌즈(88)
- 주소 지정 가능, 특수(458)
관련 제조업체







-
센서, 트랜스듀서
센서, 트랜스듀서
- 초음파 수신기, 송신기 - 산업(115)
- 온도 센서 - 온도 조절기 - 기계 - 산업(3103)
- 온도 센서 - 아날로그 및 디지털 출력 - 산업(209)
- 근접 센서 - 산업(13611)
- 압력 센서, 트랜스 듀서 - 산업(26503)
- 광학 센서 - 광자 - 카운터, 탐지기, SPCM (단일 광자 카운팅 모듈)(751)
- 광학 센서 - 카메라 모듈(875)
- 자기 센서 - 위치, 근접성, 속도 (모듈) - 산업(554)
- 힘 센서 - 산업(346)
- 흐름 센서 - 산업(151)
- 플로트, 레벨 센서 - 산업(310)
- 인코더 - 산업(4980)
- 컬러 센서 - 산업(50)
- 터치 센서(100)
- 초음파 수신기, 송신기(2421)
- 온도 센서-보 온 장치-솔리드 스테이트(1096)
- 온도 센서-보 온 장치-기계식(3397)
- 온도 센서-열전대, 온도 프로브(1921)
- 온도 센서-rtd (저항 온도 검출기)(1525)
- 온도 센서-ptc 서미스터(2273)
- 온도 센서-ntc 서미스터(13259)
- 온도 센서-아날로그 및 디지털 출력(3928)
- 스트레인 게이지(1399)
- 특수 센서(1861)
- 태양 전지(503)
- 충격 센서(84)
- 센서 인터페이스-정션 블록(2519)
- 센서 케이블-조립품(22011)
- 근접/점유 센서-완성 된 유닛(725)
- 근접 센서(2860)
- 압력 센서, 트랜스듀서(11317)
- 위치 센서-각도, 선형 위치 측정(6022)
- 광 센서-반사-로직 출력(194)
- 광 센서-반사-아날로그 출력(432)
- 광 센서-광 트랜지스터(1027)
- 광 센서-광 인터럽트-슬롯 타입-트랜지스터 출력(1427)
- 광 센서-광 인터럽트-슬롯 타입-로직 출력(1215)
- 광학 센서-광 전, 산업용(16763)
- 광 센서-포토 다이오드(1543)
- 광학적 인 감지기-사진 발견자-먼 수신기(2605)
- 광 센서-포토 검출기-로직 출력(146)
- 광학 센서-포토 감지기-cd 셀(74)
- 광학 센서-거리 측정(377)
- 광 센서-주변광, ir, 자외선 센서(1305)
- 다기능(558)
- 모션 센서-진동(337)
- 모션 센서-틸트 스위치(67)
- 모션 센서-광학(719)
- 모션 센서-경사 계(175)
- 모션 센서-immo (관성 측정 단위)(416)
- 모션 센서-자이로스코프(214)
- 모션 센서-가 속도계(1911)
- 자석-센서 매칭(119)
- 자석-다목적(1965)
- 마그네틱 센서-스위치 (솔리드 스테이트)(3700)
- 마그네틱 센서-위치, 근접, 속도 (모듈)(5199)
- 마그네틱 센서-리니어, 나침반 (ics)(1247)
- 마그네틱 센서-나침반, 마그네틱 필드 (모듈)(35)
- lvd 트랜스듀서 (선형 가변 차동 변압기)(204)
- irda 트랜시버 모듈(196)
- 이미지 센서, 카메라(2235)
- 습도, 수 분 센서(1425)
- 가스 센서(1217)
- 힘 센서(188)
- 유량 센서(550)
- 플 로트, 레벨 센서(1343)
- 인코더(6357)
- 먼지 센서(43)
- 전류 트랜스듀서(3455)
- 컬러 센서(85)
- 증폭기(1905)
관련 제조업체







-
커넥터, 상호 연결
커넥터, 상호 연결
- USB, DVI, HDMI 커넥터(446)
- 솔리드 스테이트 조명 커넥터(555)
- ICS, 트랜지스터 용 소켓(953)
- 플러그 가능한 커넥터(1221)
- 태양 광 (태양 전지판) 커넥터(136)
- 광섬유 커넥터(370)
- FFC, FPC (Flat Flexible) 커넥터(761)
- D-SUB, D 자형 커넥터(2887)
- 동축 커넥터 (RF)(2389)
- 원형 커넥터(14162)
- 블레이드 타입 전원 커넥터(273)
- 플러그와 리셉터클(2597)
- usb, dvi, hdmi 커넥터-어댑터(572)
- USB, DVI, HDMI 커넥터(4298)
- 단자-보드 커넥터에 연결(217)
- 단자-와이어 스플라이스 커넥터(4322)
- 단자-와이어 핀 커넥터(328)
- 단자-터렛 커넥터(1273)
- 단자-특수 커넥터(2042)
- 단자-스페이드 커넥터(3902)
- 단자-솔더 러 그 커넥터(345)
- 단자-스크류 커넥터(745)
- 단자-링 커넥터(12596)
- 터미널-직사각형 커넥터(4747)
- 터미널-빠른 연결, 빠른 연결 끊기 커넥터(8514)
- 터미널-pc 핀, 단일 포스트 커넥터(3776)
- 단자-pc 핀 소켓, 소켓 커넥터(5883)
- 단자-마그네틱 와이어 커넥터(1653)
- 터미널-나이프 커넥터(112)
- 터미널-하우징, 부츠(2850)
- 단자-호 일 커넥터(108)
- 단자-배럴, 총알 커넥터(1107)
- 단자-어댑터(137)
- 터미널 스트립 및 터렛 보드(1159)
- 터미널 정션 시스템(2533)
- 터미널 블록-보드에 와이어(43615)
- 터미널 블록-특수(3722)
- 터미널 블록-전원 분배(847)
- 터미널 블록-패널 마운트(1359)
- 터미널 블록-인터페이스 모듈(1819)
- 터미널 블록-헤더, 플러그 및 소켓(119920)
- 터미널 블록-din 레일, 채널(9373)
- 터미널 블록-연락처(65)
- 터미널 블록-배리어 블록(47517)
- 터미널 블록-어댑터(1059)
- 솔리드 스테이트 조명 커넥터-접점(271)
- 솔리드 스테이트 조명 커넥터(1344)
- ic 용 소켓, 트랜지스터-어댑터(275)
- ICS, 트랜지스터 용 소켓(22148)
- 션트, 점퍼(907)
- 직사각형 커넥터-스프링 로드(7721)
- 직사각형 커넥터-하우징(43023)
- 직사각형 커넥터-헤더, 특수 핀(6129)
- 직사각형 커넥터-헤더, 리셉터클, 암 소켓(229601)
- 직사각형 커넥터-헤더, 남성 핀(543338)
- 직사각형 연결관-자유로운 거는, 위원회 산(30142)
- 직사각형 커넥터-접점(10681)
- 직사각형 커넥터-보드, 보드에 직접 와이어(2432)
- 직사각형 커넥터-어댑터(475)
- 직사각형-보드 커넥터-헤더, 리셉터클, 암 소켓(9)
- 직사각형-보드 커넥터에 보드-헤더, 남성 핀(2)
- 사각형 커넥터 - 기판 스페이서, 스태커 (기판 대 기판)(238901)
- 사각형 커넥터 - 어레이, 에지 형, 메 자닌 (기판 대 기판)(37853)
- 전원 입력 커넥터-인 레트, 아울렛, 모듈(10310)
- 플러그 가능한 커넥터(6049)
- 태양광 (솔 라 패널) 커넥터-접점(77)
- 태양 광 (태양 전지판) 커넥터(504)
- 모듈형 커넥터-배선 블록(99)
- 모듈형 커넥터-플러그(1674)
- 모듈식 커넥터-플러그 하우징(181)
- 모듈형 커넥터-자기 학을 가진 잭(10152)
- 모듈형 커넥터-잭(23416)
- 모듈식 커넥터-어댑터(855)
- 메모리 커넥터-pc 카드-어댑터(21)
- 메모리 커넥터-pc 카드 소켓(3299)
- 메모리 커넥터-인라인 모듈 소켓(3390)
- 라 커넥터(764)
- 키스톤-인서트(2758)
- 키스톤-전면판, 프레임(1926)
- 무거운 듀티 커넥터-인서트, 모듈(4190)
- 헤비 듀티 커넥터-하우징, 후드, 베이스(17226)
- 무거운 듀티 커넥터-프레임(523)
- 헤비 듀티 커넥터-접점(1832)
- 무거운 듀티 커넥터-어셈블리(671)
- 광섬유 커넥터-하우징(919)
- 광섬유 커넥터 - 어댑터(4455)
- 광섬유 커넥터(3001)
- ffc, fpc (편평한 가동 가능한) 연결관-주거(652)
- ffc, fpc (편평한 가동 가능한) 연결관-접촉(202)
- FFC, FPC (Flat Flexible) 커넥터(18691)
- d-서브, d 자형 커넥터-터미네이터(47)
- d-서브, d 자형 커넥터-하우징(12238)
- d-서브, d 자형 커넥터-접점(2714)
- d-서브, d 자형 커넥터-백쉘, 후드(5995)
- d-서브, d 자형 커넥터-어댑터(1304)
- d-sub 커넥터(141346)
- d 자형 커넥터-중앙 공학(8770)
- 접점, 스프링 로드 및 압력(630)
- 연락처-다목적(6196)
- 연락처-리드 프레임(122)
- 동축 커넥터 (rf)-터미네이터(1231)
- 동축 커넥터 (rf)-접점(480)
- 동축 커넥터 (rf)-어댑터(6386)
- 동축 커넥터 (RF)(25734)
- 원형 커넥터-하우징(441226)
- 원형 커넥터-접점(4737)
- 원형 커넥터-백쉘 및 케이블 클램프(53692)
- 원형 커넥터-어댑터(8839)
- 원형 커넥터(1196254)
- 카드 엣지 커넥터-하우징(469)
- 카드 엣지 커넥터-엣지 보드 커넥터(672683)
- 카드 엣지 커넥터-접점(325)
- 카드 엣지 커넥터-어댑터(73)
- 블레이드 형 전원 커넥터-하우징(837)
- 블레이드 유형 전원 커넥터-접점(393)
- 블레이드 타입 전원 커넥터(4163)
- 시리즈 어댑터 간(649)
- 배럴-전원 커넥터(935)
- 배럴-오디오 커넥터(2432)
- 배럴-오디오 어댑터(92)
- 바나나 및 팁 커넥터-잭, 플러그(1644)
- 바나나 및 팁 커넥터-바인딩 게시물(239)
- 바나나 및 팁 커넥터-어댑터(75)
- 백플레인 커넥터-특수(45586)
- 백플레인 커넥터-하우징(6863)
- 백플레인 커넥터-하드 메트릭, 표준(6297)
- 백플레인 커넥터-din 41612(9408)
- 백플레인 커넥터-접점(3583)
- 백플레인 커넥터-아 르 inc 인서트(2357)
- 백플레인 커넥터-아 르 inc(3789)
관련 제조업체







-
저항기
-
커패시터
-
트랜스
-
아이 솔 레이 터
-
크리스털, 발진기, 공 진 기
-
스위치
스위치
- 인터록 스위치(2893)
- 비상 정지 (E-Stop) 스위치(1160)
- 케이블 당김 스위치(571)
- 토글 스위치(33608)
- 썸 휠 스위치(742)
- 촉각 스위치(14263)
- 스냅 동작, 리 미트 스위치(28077)
- 슬라이드 스위치(5166)
- 선별 스위치(9720)
- 로터리 스위치(13850)
- 로커 스위치(53790)
- 푸시버튼 스위치-홀 효과(127)
- 푸시버튼 스위치(190826)
- 프로그래밍 가능 디스플레이 스위치(39)
- 내비게이션 스위치, 조이스틱(1882)
- 마그네틱, 리드 스위치(1399)
- 키패드 스위치(637)
- 키 잠금 스위치(3684)
- dip 스위치(7747)
- 구성 가능한 스위치 구성품-렌즈(1435)
- 구성 가능한 스위치 컴포넌트-조명 소스(1236)
- 구성 가능한 스위치 부품-접점 블록(1401)
- 구성 가능한 스위치 구성품-본체(16077)
- 스위치 구성 요소 분리(2567)
관련 제조업체






-
릴레이



































언어 선택
현재 언어
한국의
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
L298 모터 드라이버 IC 작동 원리, 회로 및 데이터시트
시간: 2026년6월25일
먹다: 204
L298은 DC 모터, 양극 스테퍼 모터 및 기타 유도 부하를 제어하기 위해 설계된 듀얼 풀 브리지 모터 드라이버 IC입니다. L298은 여러 패키지 버전으로 제공되며, 그 중 L298N이 가장 널리 사용됩니다. "N" 표기는 더 높은 전력 처리와 쉬운 히트싱크 장착을 위해 설계된 멀티와트-15 패키지를 나타냅니다. 이 문서에서는 L298의 작동 방식, 핀 기능, 전기 사양, 지원되는 모터 유형, 일반적인 회로, 현대 모터 드라이버와의 비교, 및 일반적인 응용 프로그램에 대해 설명합니다.
브러시 DC 모터
양극 스테퍼 모터
리니어 엑추에이터 및 소형 로봇 엑추에이터
L298N 듀얼 DC 모터 드라이버 회로
카탈로그
L298 모터 드라이버 작동 방식
L298은 블록 다이어그램에서 채널 A와 채널 B로 레이블이 지정된 두 개의 독립적인 H-브리지 회로를 사용하여 DC 모터와 스테퍼 모터를 제어합니다. 각 H-브리지는 입력 핀에서 논리 신호를 수신하고 모터를 통해 흐르는 전류의 방향을 제어하기 위해 내부 트랜지스터 네트워크를 전환합니다.
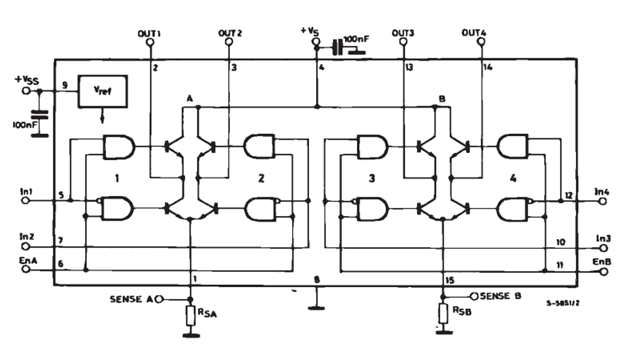
블록 다이어그램에 나타난 바와 같이, IN1과 IN2는 채널 A를 제어하고, IN3과 IN4는 채널 B를 제어합니다. 하나의 입력이 HIGH이고 다른 입력이 LOW일 때, H-브리지는 모터를 통해 전류 경로를 생성하여 회전을 유도합니다. 입력 상태를 반전시키면 전류 흐름이 반전되고 모터의 회전 방향이 변경됩니다.
ENA 및 ENB 핀은 각 H-브리지를 활성화하거나 비활성화합니다. 이러한 핀은 일반적으로 마이크로컨트롤러의 PWM 신호에 의해 구동됩니다. PWM 듀티 사이클을 조정하여 모터에 적용되는 평균 전압이 변경되어 속도를 제어할 수 있습니다.
모터 전원은 +Vs 핀을 통해 공급되며, 내부 논리는 +Vss에서 작동합니다. SENSE A 및 SENSE B 핀은 외부 저항기에 연결하여 모터 전류를 모니터링하여 보호 또는 제어 용도로 사용될 수 있습니다.
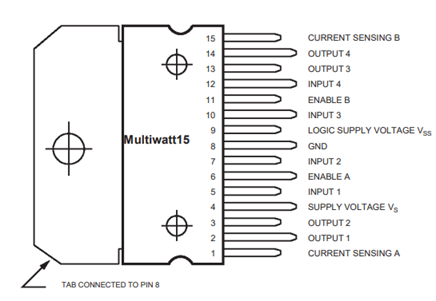
L298 핀 배치 및 핀 기능
| 핀 번호 |
핀 이름 |
기능 |
| 1 |
SENSE A |
채널 A에 대한 전류 감지 연결. 일반적으로 전류 모니터링을 위해 저항기로 연결됩니다. |
| 2 |
OUT1 |
모터에 연결된 H-브리지 A의 출력 터미널 1. |
| 3 |
OUT2 |
모터에 연결된 H-브리지 A의 출력 터미널 2. |
| 4 |
Vs |
모터 전원 공급 전압 입력. 출력 단계에 전원을 공급합니다. |
| 5 |
IN1 |
H-브리지 A에 대한 논리 제어 입력 1. IN2와 함께 작동하여 모터 방향을 제어합니다. |
| 6 |
ENA |
H-브리지 A에 대한 활성화 입력. 채널을 활성화/비활성화하고 PWM 속도 제어에 사용됩니다. |
| 7 |
IN2 |
H-브리지 A에 대한 논리 제어 입력 2. IN1과 함께 작동하여 모터 방향을 제어합니다. |
| 8 |
GND |
논리 및 전력 회로 모두에 대한 접지 연결. 금속 탭도 이 핀에 연결됩니다. |
| 9 |
Vss |
일반적으로 5V인 논리 공급 전압 입력. 내부 제어 회로에 전원을 공급합니다. |
| 10 |
IN3 |
로직 제어 입력 1, H-브리지 B에 대한 것입니다. IN4와 함께 작동하여 모터 방향을 제어합니다. |
| 11 |
ENB |
H-브리지 B에 대한 활성화 입력입니다. 채널을 활성화/비활성화하고 PWM 속도 제어에 사용됩니다. |
| 12 |
IN4 |
로직 제어 입력 2, H-브리지 B에 대한 것입니다. IN3와 함께 작동하여 모터 방향을 제어합니다. |
| 13 |
OUT3 |
H-브리지 B의 출력 단자 1이 모터에 연결됩니다. |
| 14 |
OUT4 |
H-브리지 B의 출력 단자 2가 모터에 연결됩니다. |
| 15 |
센스 B |
채널 B의 전류 감지 연결입니다. 일반적으로 전류 모니터링을 위한 저항에 연결됩니다. |
L298의 주요 전기 사양
| 사양 |
값 |
단위 |
| 모터 전원 전압 (Vs) |
최대 46 (절대 최대 50 V) |
V |
| 로직 전원 전압 (Vss) |
4.5에서 7 (일반적으로 5 V) |
V |
| 로직 입력 전압 (HIGH) |
≥ 2.3 |
V |
| 로직 입력 전압 (LOW) |
≤ 1.5 |
V |
| 연속 출력 전류 (채널당) |
2 |
A |
| 반복적 피크 출력 전류 |
2.5 |
A |
| 비반복적 피크 출력 전류 |
3 |
A |
| 총 전력 손실 |
25 |
W |
| 휴지 전원 전류 (Vs) |
13–70 |
mA |
| 휴지 전원 전류 (Vss) |
6–36 |
mA |
| 전류 감지 전압 범위 |
-1에서 2.3 |
V |
| 출력 전압 강하 (1 A 하중) |
1.8–3.2 |
V |
| 출력 전압 강하 (2 A 하중) |
최대 4.9 |
V |
| 소스 포화 전압 (1 A) |
일반적으로 1.35 |
V |
| 소스 포화 전압 (2 A) |
일반적으로 2.0 |
V |
| 싱크 포화 전압 (1 A) |
일반적으로 1.2 |
V |
| 싱크 포화 전압 (2 A) |
일반적으로 1.7 |
V |
| 최대 교환 주파수 |
25–40 |
kHz |
| 소스 턴온 지연 |
2 |
µs |
| 소스 턴오프 지연 |
1.5 |
µs |
| 소스 상승 시간 |
0.7 |
µs |
| 소스 하강 시간 |
0.2 |
µs |
| 싱크 턴온 지연 |
1.6 |
µs |
| 싱크 턴오프 지연 |
0.7 |
µs |
| 싱크 상승 시간 |
0.2 |
µs |
| 싱크 하강 시간 |
0.25 |
µs |
| 작동 온도 범위 |
-25에서 +130 |
°C |
| 저장 온도 범위 |
-40에서 +150 |
°C |
L298는 어떤 모터를 구동할 수 있나요?
L298는 듀얼 H-브리지 아키텍처를 사용하여 다양한 브러시 모터 기반 시스템을 구동하도록 설계되었습니다. 각 H-브리지는 연결된 하중의 방향과 속도를 독립적으로 제어할 수 있어 이 IC는 동시에 두 개의 DC 모터 또는 하나의 양극 스테핑 모터를 작동할 수 있습니다.
브러시 DC 모터
브러시 DC 모터는 L298에 의해 구동되는 가장 일반적인 모터입니다. 이 IC는 H-브리지 출력을 통해 전류 흐름을 전환하여 DC 모터의 회전 방향과 속도를 제어할 수 있습니다. 단일 L298는 하나의 채널을 사용하여 하나의 대형 DC 모터를 구동하거나 두 개의 개별 DC 모터를 두 개의 H-브리지 채널을 활용하여 구동할 수 있습니다.
양극 스테퍼 모터
L298는 두 개의 H-브리지 채널을 사용하여 2상 양극 스테퍼 모터를 구동할 수 있습니다. 특정 순서로 권선을 인가함으로써 모터는 연속 회전이 아닌 정밀한 각도 단계로 회전합니다. 이는 위치, 속도 및 이동 방향을 정확하게 제어할 수 있도록 합니다.
리니어 엑추에이터 및 소형 로봇 엑추에이터
많은 DC 리니어 엑추에이터는 내부 브러시 DC 모터를 사용하여 L298와 호환됩니다. H-브리지를 통해 모터 방향을 제어하여 엑추에이터는 필요에 따라 연장하거나 철수할 수 있습니다. 이는 자동화된 문, 조정 가능한 플랫폼, 밸브 및 간단한 산업 제어 시스템과 같은 응용 프로그램에 L298를 유용하게 만듭니다.
일반적인 L298 응용 회로
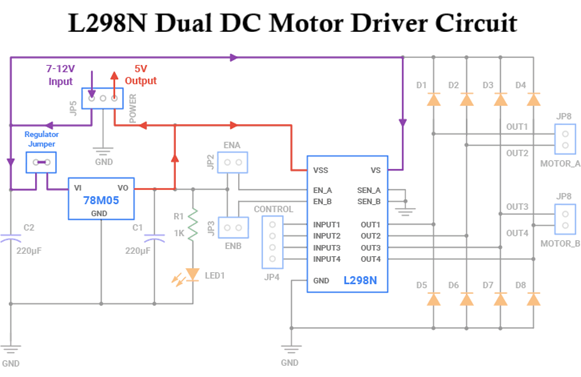
L298N 듀얼 DC 모터 드라이버 회로
이 회로는 L298N IC를 사용하여 두 개의 DC 모터를 제어합니다. 7–12V 전원이 VS 핀을 통해 모터에 전원을 공급하고, 78M05 레귤레이터가 이 입력을 5V로 변환하여 L298N 로직 섹션에 VSS 핀을 통해 공급합니다.
L298N은 두 개의 내부 H-브리지 회로를 포함하고 있습니다. 이는 각각의 모터에 전류가 양 방향으로 흐를 수 있게 하여 모터가 앞으로 또는 뒤로 회전할 수 있게 합니다. OUT1과 OUT2는 모터 A를 제어하고, OUT3과 OUT4는 모터 B를 제어합니다.
입력 핀 INPUT1부터 INPUT4는 마이크로컨트롤러로부터 신호를 받습니다. 이러한 신호는 모터의 방향을 결정합니다. ENA 및 ENB 핀은 각각의 모터 채널을 활성화하고 모터 속도를 제어하기 위해 PWM 신호를 받을 수도 있습니다.
커패시터는 전원 공급 장치를 안정화하는 데 도움을 주고, 다이오는 모터에 의해 생성되는 역 EMF 전압 스파이크로부터 IC를 보호합니다. 전반적으로 이 회로는 저전력 컨트롤러가 두 개의 DC 모터를 안전하게 구동하고 제어할 수 있게 합니다.
L297과 L298을 사용하는 양극 스테퍼 모터 드라이버 회로
이 회로는 L297 스테퍼 모터 컨트롤러와 L298N 듀얼 H-브리지 모터 드라이버를 결합하여 2상 양극 스테퍼 모터를 제어합니다. L297은 스테퍼 모터 작동에 필요한 올바른 위상 순서를 생성하고, L298N은 모터 권선에 필요한 더 높은 전류를 제공합니다.
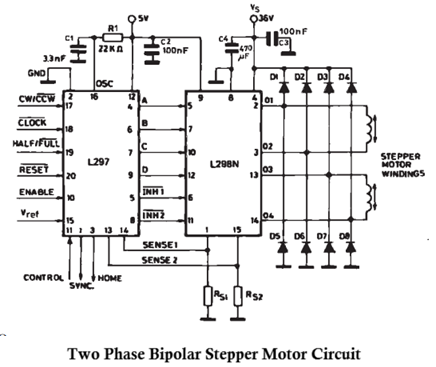
L297은 CLOCK, CW/CCW, HALF/FULL, RESET 및 ENABLE과 같은 제어 신호를 받습니다. 이러한 입력을 기반으로 하여 스텝 순서를 결정하는 네 개의 출력 신호(A, B, C 및 D)를 생성합니다. CLOCK 입력은 스텝 속도를 제어하고, CW/CCW 입력은 회전 방향을 선택합니다. HALF/FULL 입력을 통해 모터는 반 스텝 또는 전체 스텝 모드로 작동할 수 있습니다.
L297의 출력 신호는 L298N의 입력 핀에 연결됩니다. L298N은 듀얼 H-브리지 드라이버로서 두 개의 모터 권선을 통해 전류를 스위칭합니다. 올바른 순서로 권선에 전원을 공급함으로써 모터는 정확한 위치 제어와 함께 한 번에 한 스텝씩 회전합니다.
SENSE 핀에 연결된 저항 RS1 및 RS2는 전류 감지 저항입니다. 이들은 L297이 모터 전류를 모니터링하고 내부 절단 제어 기능을 통해 전류 조절을 구현할 수 있게 합니다. 이는 과도한 전류를 방지하고 모터 효율성을 향상시키는 데 도움을 줍니다.
다이오드 D1–D8은 유도성 모터 권선에서 생성되는 전압 스파이크로부터 L298N을 보호하는 플라이백 다이오드입니다. 전원 공급 장치 근처의 커패시터는 노이즈를 필터링하고 작동 전압을 안정화하는 데 도움을 줍니다.
L298 vs 현대 모터 드라이버 IC
| 데이터 |
L298 |
L293D |
TB6612FNG |
DRV8833 |
BTS7960 |
| 드라이버 유형 |
양극 트랜지스터 |
양극 트랜지스터 |
MOSFET |
MOSFET |
MOSFET |
| 모터 채널 |
2 DC 모터 |
2 DC 모터 |
2 DC 모터 |
2 DC 모터 |
1 DC 모터 |
| 지속 전류 |
2A/채널 |
600mA/채널 |
1.2A/채널 |
1.5A/채널 |
43A |
| 피크 전류 |
3A |
1.2A |
3.2A |
2A |
43A+ |
| 모터 전압 |
최대 46V |
최대 36V |
최대 13.5V |
2.7V–10.8V |
최대 27V |
| 논리 전압 |
5V |
5V |
2.7V–5.5V |
2.7V–7V |
3.3V–5V |
| 보호 다이오드 |
외부 필요 |
내장 |
내장 |
내장 |
내장 |
| 주요 용도 |
중간 DC 모터 |
소형 DC 모터 |
소형 로봇 |
저전압 로봇 |
고전류 DC 모터 |
L298의 일반적인 응용 프로그램
브러시 DC 모터 제어
L298은 일반적으로 하나 또는 두 개의 브러시가 있는 DC 모터를 구동하는 데 사용됩니다. 전류 흐름을 반전시켜 모터 방향을 변경하고 마이크로컨트롤러의 PWM 신호를 사용하여 모터 속도를 제어할 수 있습니다.
양극 스테퍼 모터 제어
L298은 올바른 순서로 권선에 전력을 공급하여 2상 양극 스테퍼 모터를 구동할 수 있습니다. 더 쉬운 단계 제어를 위해 종종 L297 컨트롤러와 함께 사용됩니다.
교육용 로봇 공학
L298은 아두이노 및 기타 마이크로컨트롤러와 쉽게 연결할 수 있기 때문에 로봇 키트와 학생 프로젝트에서 널리 사용됩니다. 이는 학습자가 모터 방향 제어, 속도 제어 및 H-브리지 작동을 이해하는 데 도움을 줍니다.
소규모 자동화 시스템
L298은 소형 컨베이어, 슬라이딩 메커니즘, 모터화된 플랫폼과 같은 간단한 자동화 시스템의 모터를 제어할 수 있습니다. 프로젝트에 전진 및 후진 운동이 필요할 때 유용합니다.
위치 조정 메커니즘
L298은 카메라 팬 앤 틸트 시스템, 소형 CNC 축, 및 기타 위치 조정 장치에 사용될 수 있습니다. 이러한 애플리케이션에서 L298은 DC 모터 또는 스테퍼 모터를 구동하여 하중을 필요한 위치로 이동합니다.
프로토타입 모터 드라이버 회로
엔지니어와 취미가들은 L298을 프로토타입 회로에 사용합니다. 왜냐하면 테스트가 쉽고, 널리 이용 가능하며, 별도의 논리 및 모터 전원을 지원하기 때문입니다. 이는 초기 모터 제어 설계 실험에 유용합니다.
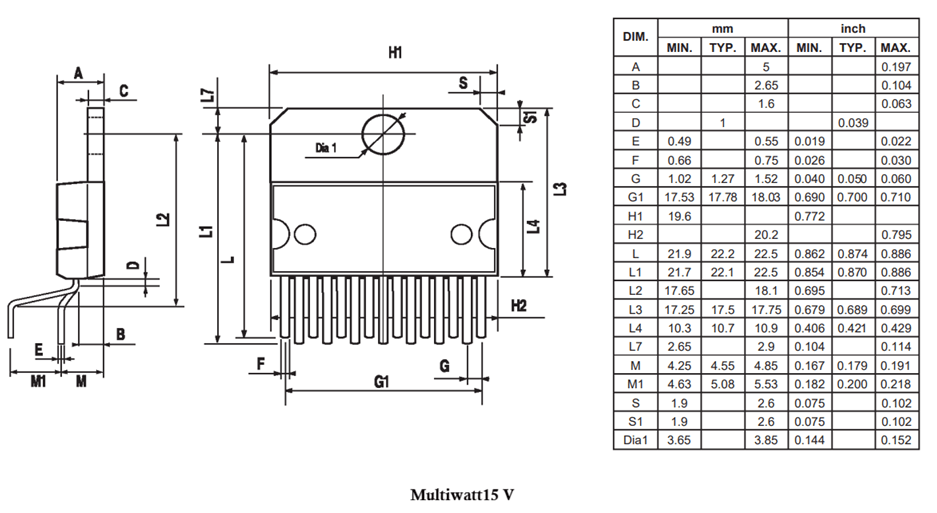
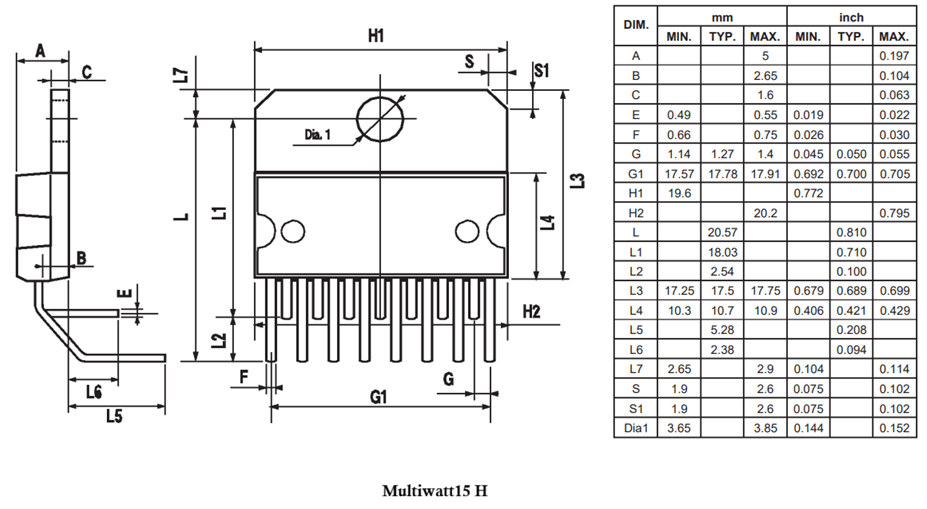
기계적 치수
결론
L298 듀얼 풀 브리지 드라이버 IC의 듀얼 H-브리지 설계는 브러시가 있는 DC 모터 2개 또는 양극 스테퍼 모터 1개를 제어할 수 있을 만큼 유연합니다. 또한, ENA 및 ENB 핀은 PWM을 통한 간단한 속도 제어를 허용합니다. 최신 MOSFET 기반 드라이버가 더 효율적이고 더 작고 더 시원하지만, L298은 이해하기 쉽고, 널리 이용 가능하며, 교육용 로봇 공학, 프로토타입, 소형 자동화 시스템 및 일반 모터 제어 회로에 적합하기 때문에 여전히 유용합니다.
자주 묻는 질문 [FAQ]
1. L298이 별도의 논리 공급(Vss) 및 모터 공급(Vs)을 필요로 하는 이유는 무엇입니까?
L298은 신뢰성을 개선하기 위해 논리 및 모터 전원 부분을 분리합니다. 논리 공급은 내부 제어 회로를 전원으로 공급하고, 모터 공급은 H-브리지 출력에 전원을 공급합니다. 이는 모터 전압 변동과 전기 노이즈가 제어 신호에 간섭하는 것을 방지합니다.
2. L298이 최신 모터 드라이버 IC보다 더 많은 열을 발생시키는 이유는 무엇입니까?
L298은 출력을 전송할 때 더 높은 전압 강하가 있는 바이폴라 트랜지스터 기술을 사용합니다. 이로 인해 더 많은 전력이 열로 변환됩니다. 최신 MOSFET 기반 드라이버는 손실이 적어 더 효율적으로 작동합니다.
3. PWM 속도 제어는 L298에서 어떻게 작동합니까?
PWM은 ENA 또는 ENB 핀을 빠르게 켜고 끕니다. PWM 신호의 듀티 사이클을 변경함으로써 모터에 전달되는 평균 전압이 변하고, 공급 전압을 변경하지 않고도 부드러운 속도 제어가 가능합니다.
4. L298에 전류 감지 핀이 포함된 이유는 무엇입니까?
Sense A 및 Sense B 핀은 외부 저항기를 사용하여 모터 전류를 측정할 수 있게 합니다. 이 기능은 과전류 보호, 전류 제한, 모터 모니터링, 및 폐쇄 루프 모터 제어 시스템에 사용할 수 있습니다.
5. 어떤 요소가 L298에 적합한 모터를 결정합니까?
가장 중요한 요인은 모터 전압, 지속 전류, 시작 전류 및 정지 전류입니다. 모터의 전류 요구 사항은 L298의 작동 한계 내에 있어야 과열 또는 손상을 피할 수 있습니다.
6. L298을 배터리 전원 장치에 사용할 수 있습니까?
예, 그러나 항상 가장 효율적인 선택은 아닙니다. L298은 더 높은 전력 손실로 인해 MOSFET 기반 드라이버보다 더 많은 에너지를 소비하여 휴대용 애플리케이션에서 배터리 수명을 줄일 수 있습니다.
7. L298 모터 회로에서 플라이백 다이오드가 중요한 이유는 무엇입니까?
모터는 전류가 갑자기 변할 때 전압 스파이크를 생성하는 유도성 부하입니다. 플라이백 다이오드는 이 에너지를 안전하게 리디렉션하고 L298을 잠재적으로 손상을 주는 역 기전력 전압으로부터 보호합니다.
관련 기사
-
![디지털 전원 공급 장치란 무엇이며 어떻게 작동합니까?]() Jun 26 2026
Jun 26 2026 -
![애플 M1 울트라 아키텍처, 성능 및 울트라퓨전 기술]() Jun 25 2026
Jun 25 2026


관련 제품

LT3430EFE-1#TRPBF
IC REG BUCK SEPIC ADJ 3A 16TSSOP

PVDZ172NS-TPBF
SSR RELAY SPST-NO 1.5A 0-60V

NCP1014ST65T3G
IC OFFLINE SWITCH FLYBACK SOT223

V24C15H50BL2
DC DC CONVERTER 15V 50W

CRCW06031K00FKEA
RES SMD 1K OHM 1% 1/10W 0603

V300A24T500A3
IGBT Modules

EPM5128LC-1
EPM5128LC-1 ALTERA

UCC38092PTR
UCC38092PTR TI

K24C256-TIRGA
N/A TSSOP8

Y8A0A111180KA
TOSHIBA BGA

AM79C973BKCW
AM79C973BKCW AMD
SCAN92620TUF
TI BGA